
L’idée

Après avoir réalisé un globe interactif (GloBuleux pour Globe faBuleux, très inspiré...) pour l’exposition "Objets en transit", la saga des globes continue avec cette fois ci un projet de globe interactif qui permettrait de pointer un endroit du globe et de l’afficher dynamiquement dans Google Earth.
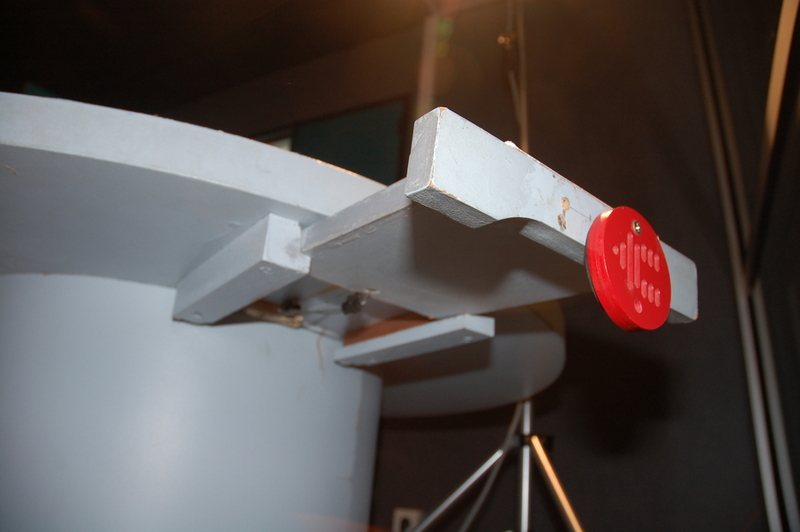
Le projet est né de la volonté de faire reprendre du service à un superbe globe (plus exactement d’une demi-sphère) ayant servi dans l’exposition "Inuits". L’utilisation de ce globe pour créer un objet communiquant rentre parfaitement dans le cadre des projets en cours, d’autant plus que ce globe a été concu pour présenter des zones arctiques et que nous sommes en plein dans l’année polaire internationale (IPY).
L’idée est donc de permettre à un utilisateur de toucher un point sur ce globe et d’afficher le point dans Google Earth. Un tiroir tactile (tiroir avec plusieurs zones sensibles) permettrait de sélectionner des couches différentes à afficher dans GoogleEarth : extension de la banquise, peuples de l’Arctique, explorations polaires, faune, etc...). Autre idée pour le tiroir : y déposer un écran tactile comme par exemple celui-ci
afin de permettre une interaction plus poussée qu’avec de simples boutons (menu arborescents, molettes de controle de zoom ou de position, etc...).
Premieres considérations
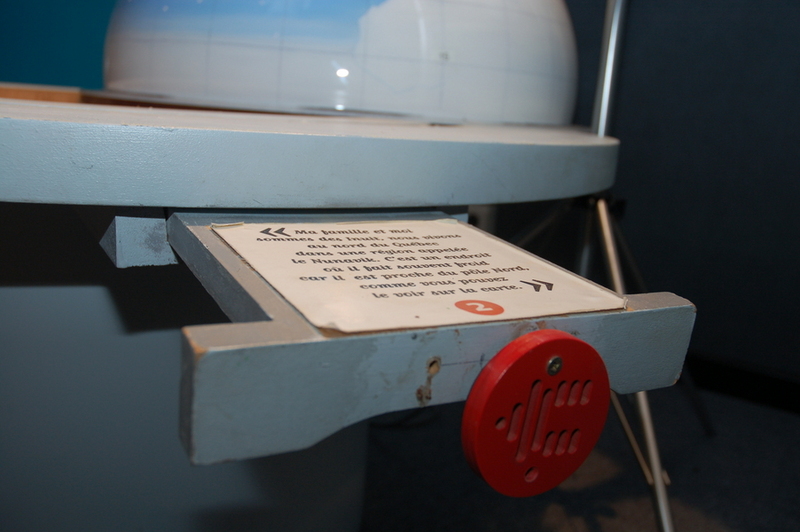
Le globe est consitué d’un socle en "Medium" (poussière de bois compressée) muni d’un tiroir (contenant un cartel à l’origine) et d’une demi-sphère en plexiglass. La demi-spère est peinte à la main de l’intérieur et représente l’hémisphère nord du globe.
Deux possibilités sont envisagées pour repérer le doigt d’un utilisateur :
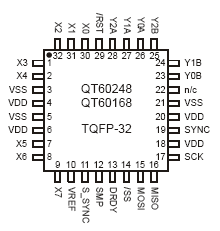
- utiliser une matrice de capteurs tactiles : cette solution est rapidement abandonnée. Les chips type QMatrix permettent au maximum 48 zones (ce qui ne donnerait des zones de 2000km x 2000km !) et sont en plus insoudable par le hobbyiste lambda (44 pattes à souder sur un carré de 7x7 mm). Les organistions matricielles permettant de multiplier les zones tactiles seraint par ailleurs très délicates à câbler dans le globe.
– utiliser la vision : cette possibilité semble plus prometteuse, mais se heurte à plusieurs problèmes. En effet, il est préférable de filmer par l’intérieur pour éviter de capter trop de parasites (corps de l’utilisateur qui se penche au dessus du globe, par exemple). Or, le socle du globe n’au aucune ouverture, il faudra donc le passer par les armes afin de pouvoir installer une caméra à l’intérieur. Ensuite, rien ne garantit que l’on puisse filmer quoi que ce soit à travers le globe peint (et encore moins extraire une information de position).
Une fois le doigt repéré, il faut que GoogleEarth affiche le point en question. La aussi, quelques obstacles conséquents apparaissent.
– transformation de coordonnées : il faudra déterminer la latitude et la longitude du point en fonction des coordonnées auxquelles a été détecté le doigt de l’utilisateur ; pas forcément très compliqué, mais le calibrage du système est assez délicat puisqu’il faudra que la position du globe soit fixe par rapport à la caméra (et inversément) ou qu’un calibrage soit effectué à chanque lancement de l’interactif.
– pilotage de Google Earth : google n’a rien prévu sous Linux pour piloter Google Earth. Il faudra fouiller pour trouver un moyen. L’idée de départ est d’émuler clavier+souris, mais ce n’est généralement pas très robuste d’envoyer des évènements de ce type à la pelle. Par ailleurs, il n’y a aucune possibilité de savoir ou en est Google Earth et qu’est-ce qu’il affiche. Donc difficile de lui dire de se décaler si l’on ne sait pas ou il est actuellement.
A suivre !